Jiawei Fu
Ph.D. student advised by Prof. Henrik Christensen

9500 Gilman Drive
La Jolla, CA 92093
I will be joining Amazon FAR for summer internship from June to September!
I am a Ph.D. student in Computer Science and Engineering at UC San Diego, where I am advised by Prof. Henrik Christensen. I also collaborate closely with Prof. Haoshu Fang and was previously advised by Prof. Hao Su. Prior to UCSD, I earned my M.Sc. in Robotics, Systems, and Control from ETH Zurich and my B.Eng. in Mechanical Engineering (Elite Program) from Tsinghua University.
I was was also a research assistant at EPFL (24 Spring) and did my research intern at MPI-INF (22 Spring).
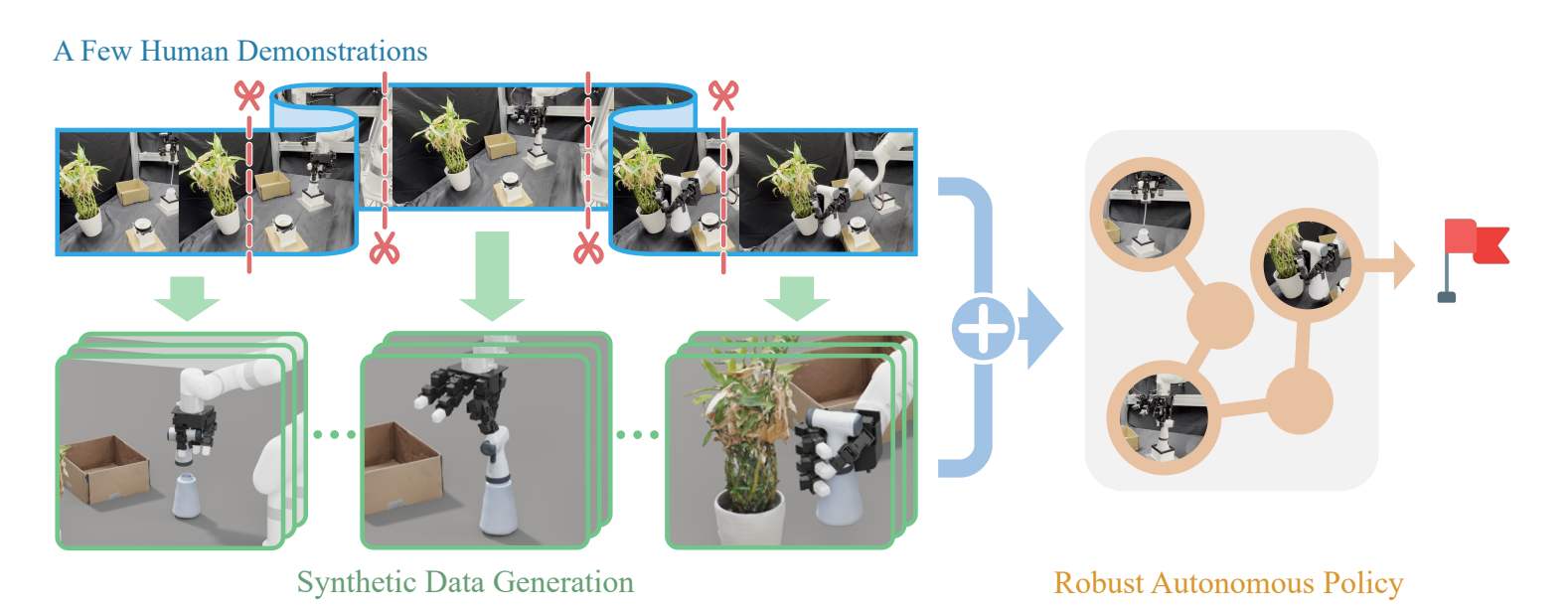
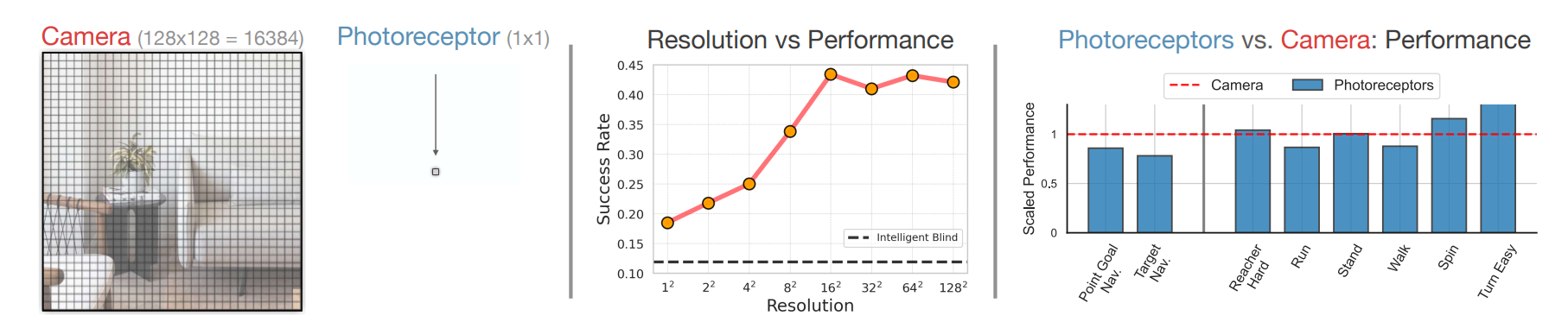
Research Interest: My research interests focus on the intersection of Robotics and Maching Learning. I’m particularly interested in developing data collection systems for diverse robots and enabling efficient learning for robot manipulation.